CoppeliaSim 4.1.0 MTB robot 場景 <<
Previous Next >> 鍵盤控制
手臂末端加入 components-gripper-suction pad 吸盤
加入suction pad式意圖
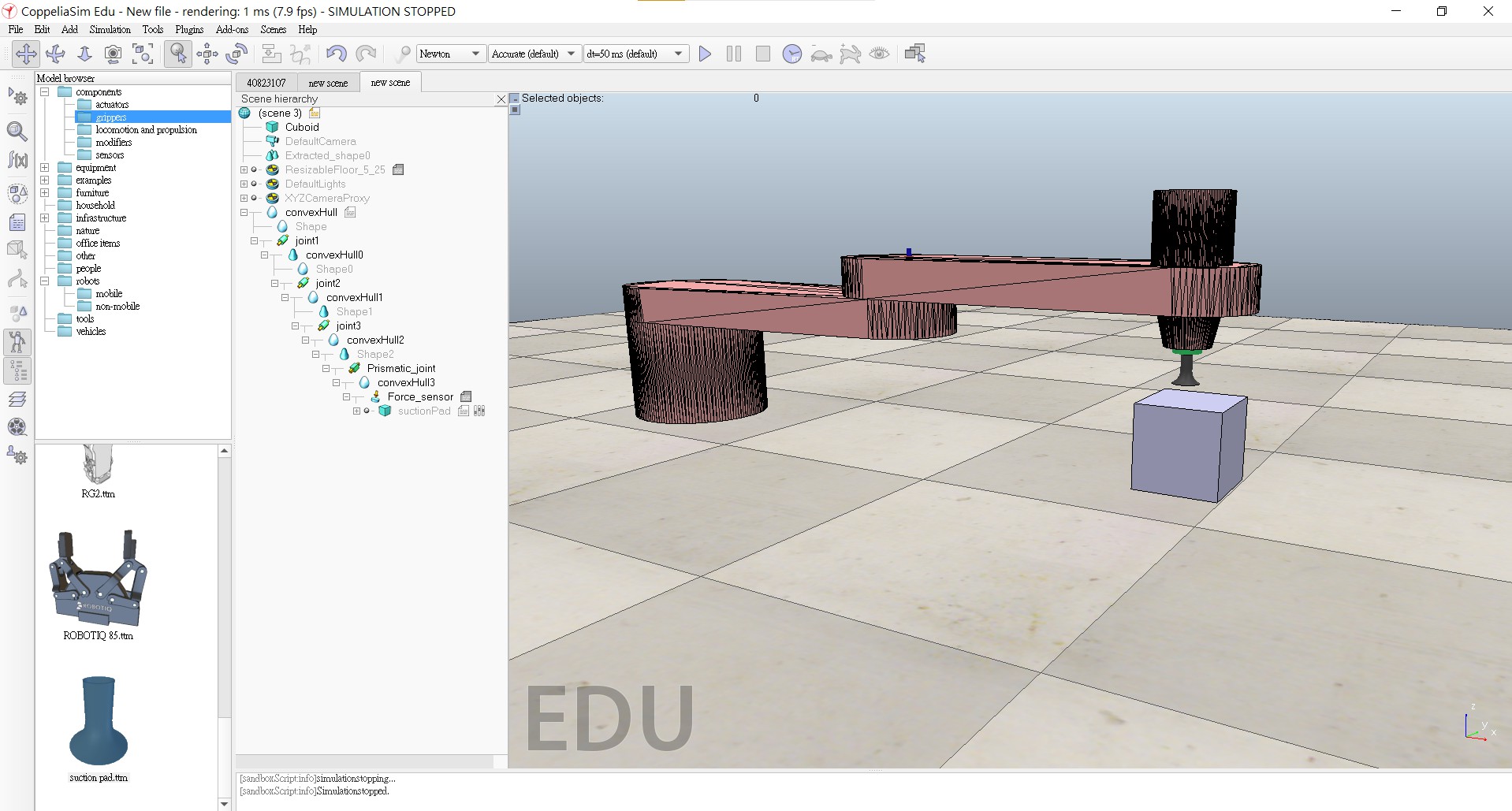
如何加入suction pad、force sensor、程式碼 video。
suction pad
function sysCall_init()
objectHandle=sim.getObjectHandle('suctionPad')
sim.setUserParameter(objectHandle,'@enable','')
modelBase=sim.getObjectAssociatedWithScript(sim.handle_self)
robotBase=modelBase
while true do
robotBase=sim.getObjectParent(robotBase)
if robotBase==-1 then
robotName='Dobot'
break
end
robotName=sim.getObjectName(robotBase)
suffix,suffixlessName=sim.getNameSuffix(robotName)
if suffixlessName=='Dobot' then
break
end
end
s=sim.getObjectHandle('suctionPadSensor')
l=sim.getObjectHandle('suctionPadLoopClosureDummy1')
l2=sim.getObjectHandle('suctionPadLoopClosureDummy2')
b=sim.getObjectHandle('suctionPad')
suctionPadLink=sim.getObjectHandle('suctionPadLink')
local gripperBase=sim.getObjectAssociatedWithScript(sim.handle_self)
infiniteStrength=sim.getScriptSimulationParameter(sim.handle_self,'infiniteStrength')
maxPullForce=sim.getScriptSimulationParameter(sim.handle_self,'maxPullForce')
maxShearForce=sim.getScriptSimulationParameter(sim.handle_self,'maxShearForce')
maxPeelTorque=sim.getScriptSimulationParameter(sim.handle_self,'maxPeelTorque')
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
function sysCall_cleanup()
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
function sysCall_sensing()
parent=sim.getObjectParent(l)
local sig=sim.getIntegerSignal("pad_switch")
if (not sig) or (sig==0) then
if (parent~=b) then
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
else
if (parent==b) then
index=0
while true do
shape=sim.getObjects(index,sim.object_shape_type)
if (shape==-1) then
break
end
local res,val=sim.getObjectInt32Parameter(shape,sim.shapeintparam_respondable)
if (shape~=b) and (val~=0) and (sim.checkProximitySensor(s,shape)==1) then
-- Ok, we found a respondable shape that was detected
-- We connect to that shape:
-- Make sure the two dummies are initially coincident:
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
-- Do the connection:
sim.setObjectParent(l,shape,true)
sim.setLinkDummy(l,l2)
break
end
index=index+1
end
else
-- Here we have an object attached
if (infiniteStrength==false) then
-- We might have to conditionally beak it apart!
result,force,torque=sim.readForceSensor(suctionPadLink) -- Here we read the median value out of 5 values (check the force sensor prop. dialog)
if (result>0) then
breakIt=false
if (force[3]>maxPullForce) then breakIt=true end
sf=math.sqrt(force[1]*force[1]+force[2]*force[2])
if (sf>maxShearForce) then breakIt=true end
if (torque[1]>maxPeelTorque) then breakIt=true end
if (torque[2]>maxPeelTorque) then breakIt=true end
if (breakIt) then
-- We break the link:
sim.setLinkDummy(l,-1)
sim.setObjectParent(l,b,true)
m=sim.getObjectMatrix(l2,-1)
sim.setObjectMatrix(l,-1,m)
end
end
end
end
end
end
CoppeliaSim 4.1.0 MTB robot 場景 <<
Previous Next >> 鍵盤控制